Robot arms for
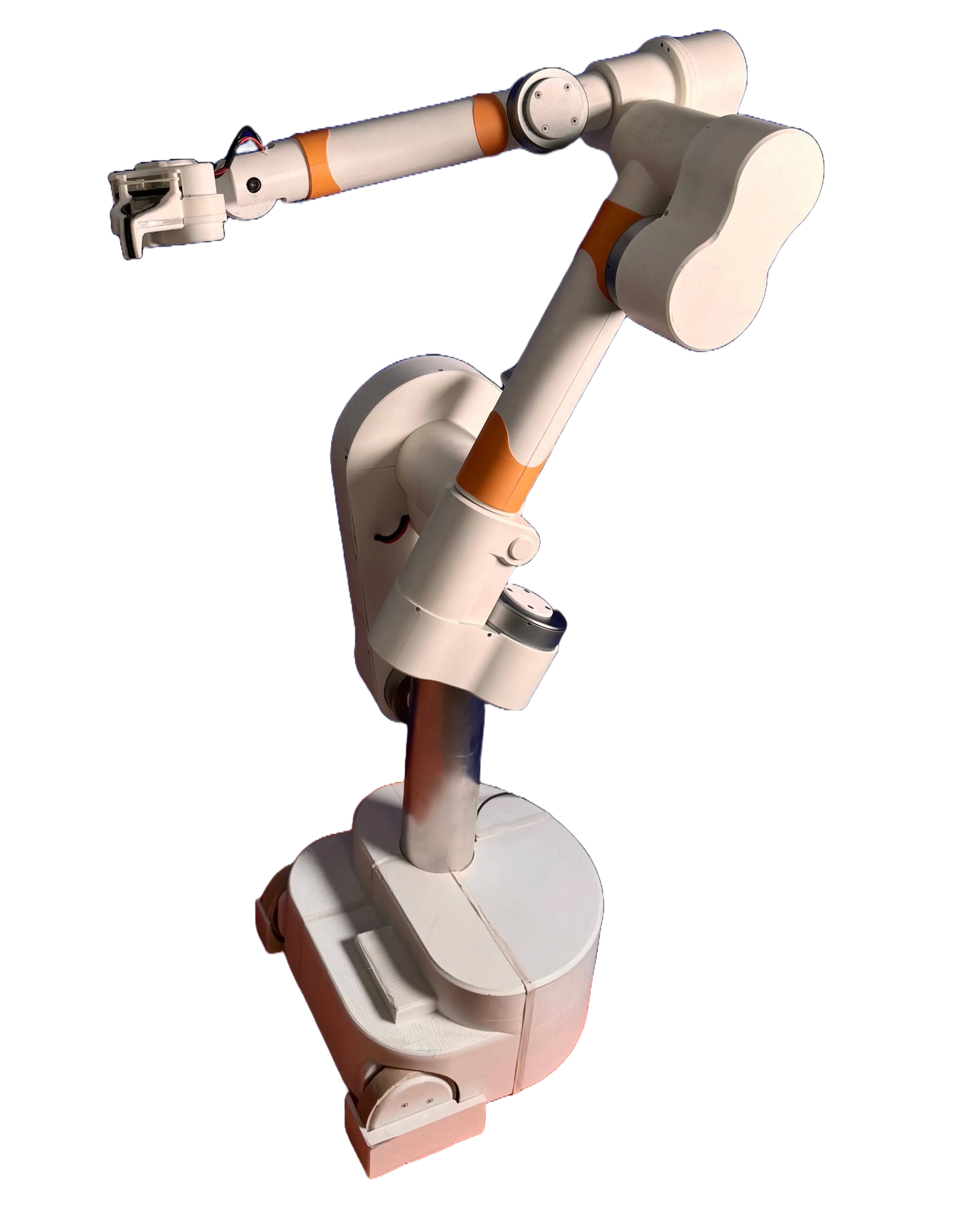
Animo arms combine the latest motor technology with our proprietary actuator design, making them affordable and inherently safe around humans.
Starting at $10,000.
Built for contact
Today's commercial robotic arms are like sledgehammers: strong and immovable. They were optimized for factories, but as physical AI advances and we deploy robots for non-industrial tasks, like dishwashing or food prep, we need arms that are both strong AND gentle.
Ultra Lightweight
At just 10kg and with low inertia actuators, Animo arms are effectively ~10x lighter during impacts, minimizing collision forces.
True Backdrivability
Low-inertia, low-friction hardware combined with active gravity and friction compensation makes Animo arms easy to backdrive.
High-Fidelity Force Control
Integrated joint torque sensing in all axes with 0.18N force repeatability makes it easy to perform contact-rich tasks.
Technical Specifications
Ideal Applications
Laboratory Automation

Food Service
Cleaning
Robot Learning Research
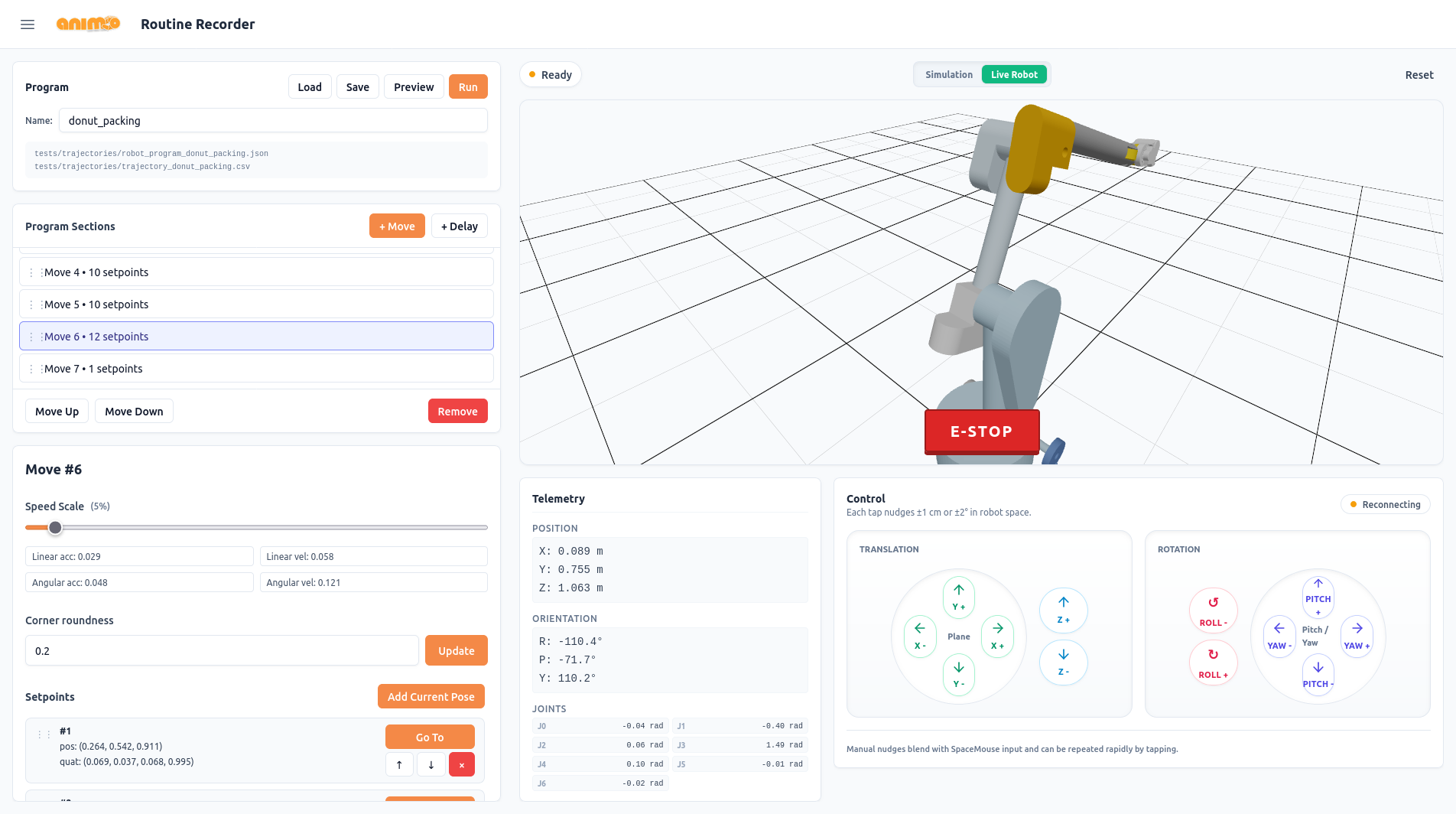
No-Code Programming for Complex Routines
Visual Trajectory Design
Create multi-step routines using motion primitives and gripper setpoints. Adjust speed, acceleration limits, and more for each movement individually.
Virtual Twin
Toggle between simulation and live hardware control with a single click. Verify kinematics and reachability in the 3D viewer before moving the physical robot.
Precise Telemetry & Control
Set the end-effector pose with incremental controls, 3D spacemouse, or backdriving the robot arm itself. Save exact poses as waypoints while monitoring real-time joint telemetry.
Full low-level access with modern SDKs
Perfect for researchers needing raw access to joint space gains, torques, safety settings, and more.
Unified SDK Access
Stream end-effector poses or command individual motor torques from a single Python interface.
Native Safety Primitives
Experiment safely with built-in soft stops, hold modes, and explicit safe-pause commands. Can be disabled as needed.
Seamless Sim-to-Real
Low-friction and low-inertia hardware is easier to model. This, combined with precise force sensing lead to more accurate simulation of real-world behavior.
Real-Time Control
100Hz high-level control loop optimized for low latency. Low level joint impedence controller runs at 8 kHz.
Transparent Physics
Each unit is calibrated to accurately model gravity, friction, and other system dynamics.
from animo import Robot
with Robot(use_hardware=False, gui=True) as robot:
# 1. Move to a nominal joint configuration (same call works in sim and hardware)
robot.move_joints(
q=[0.0, -0.5, 0.0, 1.5, 0.0, 0.0, 0.0],
speed=2.0,
blocking=True,
)
# 2. Change default joint-space gains at up to 100 Hz
robot.set_joint_gains({
1: {"K": 4800.0, "D": 85.0},
3: {"K": 750.0, "D": 13.0},
})
# 3. Custom 100 Hz Cartesian control with velocity + feed-forward wrench
for t, state in robot.control_loop(rate_hz=1000):
X, dX = state.X, state.dX
# Hold pose, drift slowly in +Y, push down with a -10 N Z-force at the tool
robot.command_cartesian(
position=X.pos,
orientation=X.orn,
linear_velocity=[0.0, 0.0, 0.0],
angular_velocity=[0.0, 0.0, 0.0],
# 6D feed-forward wrench [Fx, Fy, Fz, Tx, Ty, Tz] in world frame
feed_forward_force=[0.0, 0.0, 0.0, 0.0, 0.0, 0.0],
)
Want to build with Animo?
We're seeking collaborators for our first early access units shipping February 2026. Secure your spot with a refundable deposit.